77GHz车载毫米波雷达系统 软硬件开发高级技术解析
随着智能驾驶技术的飞速发展,车载毫米波雷达作为环境感知的核心传感器,其重要性日益凸显。其中,77GHz频段凭借其更高的分辨率、更小的尺寸和更优的性能,已成为当前高级驾驶辅助系统(ADAS)和自动驾驶领域的主流选择。本文将对77GHz车载毫米波雷达系统的软硬件开发高级技术进行概览式解析。
一、系统概述与硬件架构
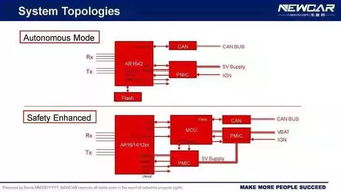
77GHz车载毫米波雷达系统主要由射频前端、中频处理单元、数字信号处理单元以及控制与接口单元构成。硬件开发的核心挑战在于高频电路设计、天线集成、功耗控制与散热管理。先进的硅基(如SiGe)或化合物半导体(如GaAs)工艺被用于制造高性能的毫米波芯片,实现发射机、接收机、频率合成器等关键模块的高度集成。多芯片模块(MCM)或系统级封装(SiP)技术有助于进一步减小体积、提升可靠性。天线设计多采用微带贴片天线阵列,通过波束成形技术实现高精度的角度测量。硬件开发需严格遵循车规级标准(如AEC-Q100),确保在恶劣环境下的长期稳定运行。
二、信号处理与算法开发(软件核心)
软件是雷达系统的“大脑”,其开发集中于信号处理算法,以实现目标检测、跟踪与分类。
- 信号处理流程:接收到的中频信号经过模数转换后,通过快速傅里叶变换(FFT)进行距离维和速度维分析(即2D-FFT),生成距离-速度谱。随后通过数字波束成形(DBF)或超分辨率算法(如MUSIC)进行角度估计,最终形成目标的距离、速度、角度三维点云信息。
- 关键算法:
- 恒虚警率检测(CFAR):在复杂背景噪声中自适应地检测真实目标。
- 多目标跟踪算法:如最近邻域(NN)、联合概率数据关联(JPDA)或更先进的粒子滤波、卡尔曼滤波及其变种,用于关联连续帧之间的点云,形成稳定轨迹。
- 目标分类与识别:利用点云特征(如微多普勒特征)或机器学习模型(如支持向量机、神经网络)区分车辆、行人、自行车等不同目标。
- 感知融合预处理:为与摄像头、激光雷达等其他传感器融合提供高质量的目标列表。
软件开发需在嵌入式平台(如DSP、GPU或专用ASIC)上实现高度优化的实时代码,并考虑功能安全标准(如ISO 26262)。
三、软硬件协同设计与高级主题
- 软硬件协同:算法复杂度与硬件算力、功耗的平衡是关键。通常采用硬件加速(如用FPGA处理FFT、滤波)与软件灵活控制相结合的方式。硬件在环(HIL)仿真平台是验证软硬件协同工作有效性的重要工具。
- 抗干扰技术:随着车载雷达密度增加,同频干扰成为严峻挑战。软件开发需集成跳频、编码调制、MIMO等技术中的干扰检测与抑制算法。硬件上则需优化线性度和动态范围。
- 高分辨率成像:先进的4D成像雷达通过大规模MIMO阵列和复杂算法,不仅能提供传统三维信息,还能获取目标的高度信息,甚至生成粗略的轮廓图像,这极大地依赖于强大的信号处理算法和硬件算力。
- 开发与测试:整个开发流程依赖于雷达模拟器、场景仿真软件(如Prescan、CarMaker)和实车路测的紧密结合。模型在环(MIL)、软件在环(SIL)测试在早期验证算法逻辑至关重要。
77GHz车载毫米波雷达系统的软硬件开发是一项涉及射频工程、信号处理、嵌入式软件和汽车电子等多学科的深度集成任务。未来的趋势是向着更高集成度、更智能化的感知(感知-决策一体化)、更强大的抗干扰能力以及更低的成本持续演进。开发者需紧跟芯片工艺、算法创新和行业标准的发展,才能打造出满足下一代智能驾驶需求的高性能雷达系统。
如若转载,请注明出处:http://www.taolehui555.com/product/43.html
更新时间:2026-06-17 00:37:39